„Bode“ ir „Nyquist“ diagramos yra labai populiarios diagramos, ypač elektrocheminės varžos spektroskopijos arba EIS duomenų tarp elektrochemikų. Taigi „Nyquist Plot“ pavadintas švedų kilmės amerikiečio vardu „Harry Nyquist“. Jis yra elektros inžinierius ir sukūrė šį sklypą elektronikos tikslams 1932 m. EIS metu surenkama daug informacijos ir šią surinktą informaciją reikia pateikti. Taigi, nuotrauka suteikia daugiau informacijos nei šimtas žodžių. Taigi elektrocheminės varžos spektroskopijai parodyti naudojamas grafinis vaizdas, pavyzdžiui, Nyquist diagrama. Šiame straipsnyje pateikiama informacija apie Nyquist siužetas – Veikimas, privalumai ir trūkumai.
Nyquist siužeto apibrėžimas
Grafinis vaizdas, kuris plačiai naudojamas perdavimo funkcijoms, yra žinomas kaip Nyquist sklypas. Tai dažnio atsako diagrama, naudojama valdymo sistemai įvertinti su grįžtamojo ryšio stabilumu. Tai yra tikrosios ir įsivaizduojamos perdavimo funkcijos dalių sudėtingoje plokštumoje parametrinis grafikas, nes dažnio parametras slenka per nurodytą intervalą. Dekarto koordinatėse tikroji nykisto diagramos perdavimo funkcijos dalis brėžiama X ašyje, o įsivaizduojama perdavimo funkcijos dalis – Y ašyje.
Nyquist Plot naudojamas automatiniam valdymui ir signalų apdorojimui stabilumo analizei, nes kiekvienas gali akimirksniu patikrinti, ar kilpa su neigiamu grįžtamuoju ryšiu atitinka Nyquist stabilumo principą. Jei Nyquist siužetas atviros kilpos valdymo sistema apytiksliai apima tašką virš tikrosios ašies, po to lygiavertė uždarojo ciklo sistema yra nestabili.
Nyquist sklypo grafikas
Nyquist grafiko grafikai yra poliarinių grafikų, daugiausia naudojamų ieškant uždaro ciklo valdymo sistemos stabilumą tiesiog pakeičiant „ω“ iš –∞ į ∞.tai reiškia, kad šie brėžiniai dažniausiai naudojami brėžiant atvirojo ciklo perdavimo funkcijos bendrą dažnio atsaką. Nyquist sklypas tiesiog įvertina valdymo sistemos stabilumą su grįžtamuoju ryšiu. Taigi Dekarto koordinačių sistemoje perdavimo funkcijos tikrasis par yra tiesiog brėžiamas virš X ašies, o įsivaizduojama dalis tiesiog brėžiama virš Y ašies.
Panašų Nyquist diagramą galima paaiškinti paprasčiausiai su polinėmis koordinatėmis, kur perdavimo funkcijos padidėjimas yra radialinė koordinatė, o perdavimo funkcijos fazė yra lygiavertė kampinė koordinatė.
Nyquist siužetą galima suprasti žinant kai kuriuos vartojamus terminus. Nyquist sklype uždaras kelias sudėtingoje plokštumoje žinomas kaip kontūras.
Nyquist kelias
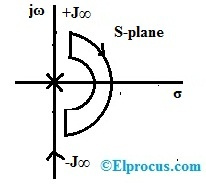
Nyquist takas arba Nyquist kontūras yra uždaras kontūras s plokštumoje, kuris visiškai apgaubia visą dešinę s plokštumos pusę. Norint aptverti visą plokštumos RHS, išilgai „jω“ ašies ir centro ties šaltiniu nubrėžiama didelė puslankiu juosta. Pusapskritimo spindulys tiesiog traktuojamas kaip Nyquist aplinka.

Nyquist apsupimas
Yra žinoma, kad taškas yra apjuostas linija, jei jis randamas kreivėje.
Nyquist žemėlapių sudarymas
Procedūra, kurios metu taškas s plokštumoje pakeičiamas į tašką F(s) plokštumoje, yra žinomas kaip atvaizdavimas, o F(s) yra žinoma kaip atvaizdavimo funkcija.
Grįžtamojo ryšio valdymo sistemos stabilumo analizė daugiausia priklauso nuo charakteristikų lygties, esančios virš s plokštumos, vietos šaknų atpažinimo.
Taigi, jei šaknis s plokštumoje yra kairėje pusėje, valdymo sistema yra stabili. Taigi santykinį sistemos stabilumą galima nustatyti naudojant įvairius dažnio atsako metodus, tokius kaip Nyquist diagrama, Bode diagrama ir Nichols diagrama.
Nyquist stabilumo kriterijus
Nyquist stabilumo kriterijus daugiausia naudojamas atpažinti būdingos lygties šaknis tam tikroje S plokštumos srityje. Nyquist stabilumo kriterijus, pvz., N = Z – P tiesiog tai sako. „N“ yra bendras apvadų skaičius, susijęs su kilme, „P“ yra polių skaičius, o „Z“ yra bendras nulių skaičius.
1 atveju: kai N = 0 (be apsupimo), taigi Z = P = 0 ir Z = P.
Jei N = 0, P turėtų būti '0', kad sistema būtų stabili.
2 atveju: kai N didesnis nei 0 (apskritimas pagal laikrodžio rodyklę), taigi P = 0, Z ≠0 ir Z > P
Šiais dviem atvejais sistema yra nestabili.
3 atveju: kai N yra mažesnis nei 0 (apskritimas prieš laikrodžio rodyklę), taigi Z = 0, P ≠0 ir P > Z
Taigi sistema yra stabili.
Kaip nupiešti Nyquist siužetą?
Yra daug žingsnių, susijusių su nyquist siužeto piešimu, kuris aptariamas toliau.
- 1 veiksme: reikia patikrinti polius, ar nėra atviros kilpos perdavimo funkcijos, pvz., G(s)H(s) „s“ plokštumoje.
- 2 veiksme: pasirinkite teisingą Nyquist kontūrą įtraukdami visą dešinę s plokštumos pusę, tiesiog nubrėždami spindulio „R“ puslankį, kur R linkęs į begalybę.
- 3 veiksme: atpažinkite skirtingus kontūro segmentus su vieta iki Nyquist kelio.
- 4 veiksme: atvaizdavimo segmentą reikia atlikti per segmentą tiesiog pakeičiant atitinkamą segmento lygtį atvaizdavimo funkcijoje. Paprastai mes turime nubraižyti konkretaus segmento poliarinius brėžinius.
- 5 veiksme: Paprastai segmentų atvaizdavimas atspindi konkretaus teigiamos įsivaizduojamos ašies kelio atvaizdavimą.
- 6 veiksme: pusapvalė juosta, apimanti dešinę plokštumos pusę, paprastai susieta su tašku G(s) H(s) plokštumoje.
- 7 veiksme: sujunkite visus įvairius atvaizdavimo segmentus, kad gautumėte reikiamą Nyquist diagramą.
- 8 veiksme: atkreipkite dėmesį į Nr. pagal laikrodžio rodyklę apjuosia apie (-1, 0) ir nustatykite stabilumą per N = Z – P.
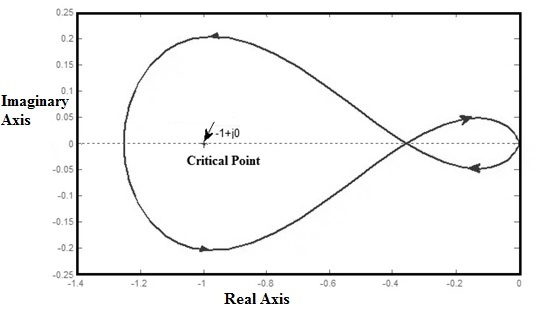
Nubraižę Nyquist grafiką, galime atrasti uždarojo ciklo valdymo sistemos stabilumą pagal Nyquist stabilumo kriterijų. Taigi, jei kritinis taškas (-1+j0) yra apsupimo išorėje, tai uždaro ciklo valdymo sistema yra visiškai stabili.
Atvirojo ciklo perdavimo funkcija yra G(S)H(S) = N(S)/D(S).
Uždarojo ciklo perdavimo funkcija yra G(S)/1+ G(S)H(S).
N(s) = nulis yra atviros kilpos nulis ir D (s) yra atviros kilpos polius.
Stabilumo požiūriu s plokštumos dešinėje pusėje neturi būti uždaros kilpos polių. Charakteristikos lygtis, pvz., 1 + G(s) H(s), lygi nuliui, reiškia uždarojo ciklo polius.
Kai 1 + G(s) H(s) lygus nuliui, tai q(s) turi būti lygus nuliui.
Taigi, stabilumo požiūriu, q (s) nuliai neturėtų būti s plokštumos dešiniojoje plokštumoje.
Norint apibūdinti stiprumą, reikia atsižvelgti į visą RHP. Taigi mes įsivaizduojame puslankį, apimantį visus RHP taškus, atsižvelgdami į puslankiu „R“, kuris linkęs į begalybę.
Stabilumo analizė su Nyquist sklypu
Iš Nyquist diagramos galime atpažinti, ar valdymo sistema yra stabili, nestabili ar nežymiai stabili, priklausomai nuo parametrų reikšmių.
- Įgykite kryžminį dažnį ir fazių perėjimo dažnį.
- Stiprinimo marža ir fazė.
Fazių perėjimo dažnis.
Dažnis, kuriuo Nyquist brėžinys susitinka su neigiama realiąja ašimi, vadinamas fazių perėjimo dažniu ir žymimas ωpc.
Gauti kryžminį dažnį
Dažnis, kuriuo Nyquist diagramos taškas turi vieną dydį, vadinamas stiprinimo kryžminiu dažniu ir žymimas ωgc.
Toliau aptariamas valdymo sistemos stabilumas, pagrįstas pagrindiniu dviejų dažnių ryšiu, pvz., fazių perjungimu ir stiprinimo perėjimu.
- Jei ωpc yra didesnis, palyginti su ωgc, tada valdymo sistema yra stabili.
- Jei ωpc yra lygiavertis ωgc, valdymo sistema yra šiek tiek stabili.
- Jei ωpc yra mažesnis, palyginti su ωgc, valdymo sistema nėra stabili.
Gaukite maržą
Stiprinimo skirtumas yra lygiavertis Nyquist diagramos dydžio atvirkštiniam koeficientui esant fazės kryžminimo dažniui.
Didinimo marža (GM) = 1/Mpc
Kur „Mpc“ yra normalios skalės dydis esant ωpc arba fazės perėjimo dažniui
Fazės marža
Fazės riba yra lygi 180 laipsnių ir fazės kampo sumai esant ωgc arba stiprinimo kryžminiam dažniui.
PM = 1800 + ϕgc
Kur ϕgc yra fazės kampas prie stiprinimo kryžminio dažnio (ωgc).
Valdymo sistemos stabilumas priklauso nuo pagrindinio ryšio tarp dviejų kraštų, pvz., stiprinimo ir fazės ribos, nurodytos toliau.
Jei stiprinimo skirtumas yra didesnis nei vienas, o fazės skirtumas yra teigiamas, valdymo sistema yra stabili.
Jei stiprinimo riba yra lygi vienetui, o fazės riba yra 0 laipsnių, valdymo sistema yra šiek tiek stabili.
Jei stiprinimo skirtumas yra mažesnis nei vienas, o fazės skirtumas yra neigiamas, valdymo sistema nėra stabili.
Nyquist siužeto pavyzdžių problemos
Ex1: Jei Nyquist diagrama nupjauna neigiamą realiąją ašį 0,6 atstumu, kokia yra sistemos stiprinimo riba?
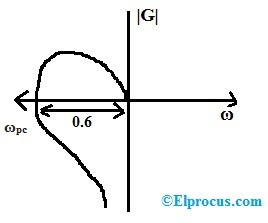
Mes žinome, kad sistemos stiprinimo riba gali būti apibrėžta kaip pokyčio dydis, reikalingas atvirojo ciklo stiprinimo viduje, kad uždaro ciklo sistema taptų nestabili.
Didinimo marža arba GM = 1/|G| wpc
Kur sistemos padidėjimas yra |G| o wpc yra fazės kryžminimo dažnis.
Fazių perjungimo dažnis gali būti apibrėžtas kaip; dažnis, kuriuo sistemos stiprinimas yra „0“.
Gm = 1/0,6 = 1,66
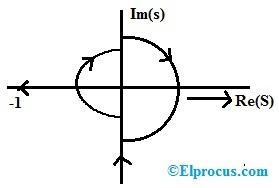
Ex2: Vienetinio stiprinimo neigiamo grįžtamojo ryšio sistemos atvirojo ciklo sistemos perdavimo funkcija gali būti pateikta kaip G(s) = 1/S(S+1). Nyquist kreivė S plokštumoje apima visą dešinės pusės plokštumą ir nedidelį plotą aplink pradinę kairėje pusėje, parodytą toliau pateiktame grafike. „Nr. taško (-1+ j0) apylinkių per G(S) Nyquist brėžinį, atitinkantį Nyquist kontūrą, kuris pažymėtas kaip „N“, tada „N“, atitinkantis?
„Nr. (-1+ j0) reikšmingojo taško apylinkių skaičius pateikiamas per N = P-Z.
Kur „N“ yra šio kritinio taško apsupimų skaičius prieš laikrodžio rodyklę.
„P“ yra atviros kilpos polių skaičius dešinėje S plokštumos pusėje.
„Z“ yra uždaro ciklo polių skaičius dešinėje S plokštumos pusėje.
N = P stabilumui Z = 0.
Aukščiau pateikta formulė galioja tik tada, kai dešinėje S plokštumos pusėje yra apibrėžta Nyquist kreivė, o poliai neįtraukiami į šaltinį. Kreivė turi suktis pagal laikrodžio rodyklę, o kritinis taškas turi būti apjuostas prieš laikrodžio rodyklę.
G(s) = 1/S(S+1).
Atviros kilpos poliai yra esant S = 0,-1
Uždarojo ciklo perdavimo funkcija = 1/S^2+S+1
Virš dešinės pusės uždaro stulpo skaičius lygus nuliui.
Tačiau Nyquist kontūras apibrėžiamas visai pusei S plokštumos ir apima polių pradinėje vietoje.
Taigi, esant S = 0, atviros kilpos polius laikomas ašigaliu dešinėje S plokštumos pusėje.
N = P-Z =>1-0 =>1
Privalumai ir trūkumai
The Nyquist siužeto privalumai įtraukti toliau nurodytus dalykus.
- Nyquist sklypas yra labai naudingas įrankis nustatant sistemos stabilumą.
- Jis turi daug pranašumų, palyginti su Routh-Horwitz ir šakniniu lokusu, nes jis tiesiog valdo laiko delsą.
- Tačiau tai labiausiai naudinga, nes suteikia mums metodą, kaip panaudoti Bode brėžinį stabilumui nustatyti.
- Tai naudojant galima spręsti apie valdymo sistemos stabilumą.
- Atvirojo ciklo perdavimo funkcija randama tiesiog išmatuojant jos dažnio atsaką.
- Tai geriau, palyginti su šaknies lokusu, atsižvelgiant į laiko delsą, o tai reiškia, kad Nyquist sklypas gali tiesiog valdyti laiko delsą sistemoje.
- Jis gali nustatyti atvirojo ciklo perdavimo funkcijos dažnio atsaką.
- Jis randa Nr. stulpų galimi stulpai dešinėje s plokštumos pusėje.
- Jis nustato santykinį sistemos stabilumą/
The Nyquist siužeto trūkumai įtraukti toliau nurodytus dalykus.
- Nyquist sklypas naudoja kai kuriuos sudėtingus matematinius metodus.
- Tai negali išspręsti viso sistemos stiprumo.
- Tai nepateikia tikslios informacijos apie turimus polius dešinėje s-plokštumos pusėje.
Nyquist sklypo programos
„Nyquist“ siužeto pritaikymai apima šiuos dalykus.
- Nyquist diagrama naudojama sistemos stabilumui nustatyti naudojant grafinį procesą dažnių srityje.
- Nyquist diagrama arba dažnio atsako diagrama daugiausia naudojama valdymo inžinerijoje ir signalų apdorojimui.
- Tai yra poliarinių sklypų plėtinys, naudojamas uždarojo ciklo valdymo sistemos stabilumui nustatyti.
- Tai labai naudinga priemonė sistemos stabilumui nustatyti.
- Naudodami Nyquist diagramą, galime stebėti atstumą tarp dviejų taškų (–1, 0) ir tašką, kuriame kreivė kerta neigiamą realiąją ašį.
Kaip „Nyquist Plot“ naudojamas stabilumui nustatyti?
Stabilumą galima nustatyti naudojant Nyquist Plot tiesiog pažiūrėjus į Nr. taško apylinkių (−1, 0). Padidinimų, kuriais sistema veiks stabiliai, įvairovę galima nustatyti žiūrint į tikrąsias ašių sankirtas. Šiame diagramoje pateikiama keletas duomenų apie perdavimo funkcijos formą.
Kokie yra Nyquist atrankos kriterijai?
Nyquist kriterijai reikalauja, kad diskretizavimo dažnis būtų bent du kartus didesnis už didžiausią signale esantį dažnį. Jei diskretizavimo dažnis yra žemesnis nei du kartus didesnis už didžiausią analoginio signalo dažnį, įvyks reiškinys, vadinamas slapyvardžiu.
Kas naudojamas Nyquist plotui?
„Nyquist Plot“ naudojama atvirojo ciklo perdavimo funkcija.
Kas yra Nyquist taisyklė?
Nyquist taisyklė paprasčiausiai teigia, kad periodinis signalas turi būti imtas du kartus didesniu už didžiausio signalo dažnio komponentą. Tiesą sakant, kadangi turimas laikas yra ribotas, atrankos dažnis yra šiek tiek didesnis nei reikia.
Kas yra „Nyquist Bit Rate Formula for Noiseless“?
Nyquist tiesiog teigia, kad pralaidumo „B“ kanale galite perduoti iki 2B stačiakampių signalų per kiekvieną sekundę, taigi, Rp ≤ 2B, kur „Rp“ yra pulso dažnis.
Ką reprezentuoja Nyquist siužetas?
Nyquist diagrama parodo tam tikrą informaciją apie perdavimo funkcijos formą. Taigi, pavyzdžiui; šiame brėžinyje pateikiama informacija apie skirtumus tarp Nr. perdavimo funkcijos polių ir nulių per kampą, kuriame kreivė pasiekia pradinį tašką.
Taigi, tai yra Nyquist siužeto apžvalga – privalumai, trūkumai ir pritaikymas. Nyquist diagramos yra naudojamos valdymo sistemos savybėms, tokioms kaip stabilumas, fazės atsarga ir stiprinimo atsarga, analizuoti. Nyquist sklypas naudojant Matlab padeda mums sudaryti Nyquist sklypo grafiką, susijusį su dažnio atsaku, sukurtu naudojant adinaminį modelį. Čia tau klausimas, kas yra bodės sklypas?