Pirmasis sėkmingas PID valdymo teorijos įvertinimas buvo praktiškai patikrintas automatinių laivų vairavimo sistemų srityje maždaug 1920 m. Po to jis buvo pritaikytas įvairiems pramoniniams automatiniams procesų valdymams, kuriems reikalingos optimizuotos ir tikslios gamybos produkcijos specifikacijos. Gamybos vienetams PID buvo populiariai įgyvendinta, norint pasiekti tikslų pneumatinį valdymą, ir galiausiai PID teorija buvo pritaikyta elektroniniuose valdikliuose šiais laikais.
Kas yra PID valdiklis
Terminas PID yra proporcinio integralinio išvestinio valdiklio, kuris yra grįžtamojo ryšio kilpos mechanizmas, skirtas tiksliai valdyti įvairias pramoninio valdymo mašinas ir daugelį kitų panašių programų, kurioms reikalingi kritiniai ir automatiniai moduliacijos valdikliai, akronimas.
Norėdami tai įgyvendinti, PID valdiklis nuolat stebi sistemos veikimą ir apskaičiuoja sukeltos klaidos elementą. Tada ji įvertina šią momentinės paklaidos vertę kaip skirtumą tarp reikalingo nustatyto taško (SP) ir išmatuoto proceso kintamojo (PV).
Atsižvelgiant į tai, kas išdėstyta pirmiau, momentinė ir automatinė grįžtamojo ryšio korekcija atliekama proporcinių (P), integralinių (I) ir išvestinių (D) išraiškų atžvilgiu, taigi ir pavadinimu PID valdiklis.
Paprastais žodžiais, PID valdiklis, naudodamasis nurodytu algoritmu, nuolat stebi tam tikros mašinos sistemos darbą ir nuolat koreguoja jos išvesties atsaką, priklausomai nuo išorinių įtakų sukeliamų pokyčių. Taigi jis užtikrina, kad mašina visada dirbs nustatytomis idealiomis sąlygomis.
Suprasti PID blokų schemą
PID valdiklis yra laikomas universalia valdymo sistema dėl savo sugebėjimo aptikti ir valdyti 3 valdymo parametrus: proporcinį, integralų ir išvestinį ir labai tiksliai taikyti numatytą optimalų išvesties valdymą, atsižvelgiant į šiuos 3 parametrus.
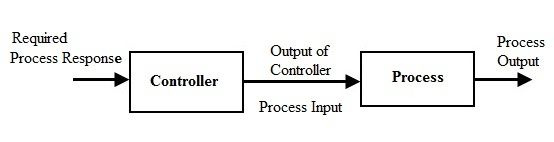
Žemiau pateiktame paveikslėlyje parodyta PID blokinė schema. Remdamiesi šia blokine schema, galime greitai suprasti pagrindinį PID veikimo principą.

vaizdo mandagumas: en.wikipedia.org/wiki/File:PID_en.svg
Čia mes galime pamatyti kintamųjų rinkinį, pvz., E (t), atitinkantį paklaidos vertę, r (t), atitinkantį tikslinį nustatytą tašką, ir y (t) kaip išmatuotą proceso kintamąjį. PID valdiklis viso savo veikimo metu stebi paklaidos vertę e (t), įvertindamas skirtumą tarp numatytos nustatomosios vertės r (t) arba SP ir išmatuotos proceso vertės y (t) arba PV, ir todėl atlieka grįžtamojo ryšio korekciją arba optimizavimą naudodamas parametrus būtent: proporcinis, integralus ir išvestinis.
Valdiklis toliau stengiasi sumažinti klaidos efektą, reguliuodamas valdymo kintamąjį u (t) pagal naujas vertes, remdamasis išanalizuota valdymo sąlygų svertine suma (p, I, d).
Pavyzdžiui, valdant vožtuvą, jo atidarymas ir uždarymas gali būti nuolat keičiami PID atliekant kompleksinius vertinimus, kaip paaiškinta aukščiau.
Parodytoje sistemoje įvairius terminus galima suprasti taip, kaip paaiškinta toliau:
P- valdiklis:
Terminas P yra proporcingas momentinėms paklaidų reikšmėms e (t), gautoms įvertinus SP - PV rezultatą. Tais atvejais, kai paklaidos vertė linkusi didėti, valdymo išvestis taip pat proporcingai didėja, atsižvelgiant į padidėjimo koeficientą „K“. Tačiau procese, kuriai reikalingas kompensavimas, pvz., Reguliuojant temperatūrą, proporcingas valdymas atskirai gali sukelti netikslumus per nustatytą tašką ir faktinę proceso vertę, nes jis negali tinkamai dirbti be grįžtamojo ryšio klaidų, kad būtų sukurtas proporcingas atsakas. Reiškia, kad negavus grįžtamojo ryšio, tinkamas taisomasis atsakymas gali būti neįmanomas.
Aš - valdiklis:
Terminas I tampa atsakingu už anksčiau įvertintas SP - PV klaidų vertes ir integruoja jas per savo veikimo laikotarpį, kad sukurtų terminą I. Pavyzdžiui, kai proporcingas valdymas taikomas, jei SP - PV sukelia kokią nors klaidą, parametras I suaktyvėja ir bando nutraukti šią likutinę klaidą. Tai iš tikrųjų atsitinka, kai valdymo atsakas įsijungia dėl anksčiau užfiksuotos klaidos bendros vertės. Kai tik tai atsitiks, I terminas nebetęsia didėjimo. Dėl to proporcinis poveikis atitinkamai sumažėja, kai klaidos faktorius mažėja, nors tai taip pat kompensuojama, kai vystosi vientisas poveikis.
D- valdiklis:
Terminas D yra tinkamiausias apytikslis, apskaičiuojamas atsižvelgiant į SP - PV paklaidos tendencijas, atsižvelgiant į momentinį klaidos faktoriaus kitimo greitį. Jei šis pokyčių greitis sparčiai didėja, grįžtamojo ryšio kontrolė įgyvendinama agresyviau ir atvirkščiai.
Kas yra PID derinimas
Aukščiau aptartiems parametrams gali reikėti teisingo balansavimo, kad būtų užtikrinta optimali valdymo funkcija, ir tai pasiekiama per procesą, vadinamą „kilpos derinimu“. Dalyvaujančios derinimo konstantos žymimos „K“, kaip parodyta tolesniuose išskaičiavimuose. Kiekviena iš šių konstantų turi būti atskirai išvesta pasirinktai programai, nes konstantos griežtai priklauso ir skiriasi atsižvelgiant į konkrečių išorinių parametrų, susijusių su kilpa, ypatybes ir įtaką. Tai gali apimti jutiklių, naudojamų tam tikram parametrui matuoti, atsaką, galutinį droselio elementą, pvz., Valdymo vožtuvą, galimą ciklo signalo laiką ir patį procesą.
Gali būti priimtina, kai įgyvendinimo pradžioje naudojamos apytikslės konstantų vertės, atsižvelgiant į taikymo tipą, tačiau tai gali reikėti šiek tiek rimtai sureguliuoti ir pakoreguoti atliekant praktinius eksperimentus, priverčiant keisti nustatytus taškus ir vėliau stebint atsakymą sistemos valdymas.
Nesvarbu, ar matematinis modelis, ar praktinis ciklas, galima pastebėti, kad abu terminai naudoja „tiesioginį“ valdymo veiksmą. Reiškia, kai nustatomas teigiamos klaidos padidėjimas, atitinkamai padidinta teigiama kontrolė pradedama kontroliuoti situaciją susumavus susijusius terminus.
Tačiau tai gali reikėti pakeisti programose, kur išvesties parametras gali turėti priešingai sukonfigūruotą charakteristiką, kuriai reikalinga atvirkštinė korekcinė priemonė. Panagrinėkime srauto kilpos pavyzdį, kai vožtuvo atidarymo procesas yra nurodytas veikti naudojant 100% ir 0% išėjimą, tačiau jį reikia valdyti atitinkama 0% ir 100% išėjimo galia, šiuo atveju atvirkštinė korekcinė kontrolė tampa būtina. Tiksliau apsvarstykite vandens aušinimo sistemą, turinčią apsauginę funkciją, kai jos vožtuvas turi būti 100% atidarytas signalo praradimo metu. Tokiu atveju valdiklio išvestis turi būti pakeista į 0% valdymą, jei nėra signalo, kad vožtuvas galėtų atsidaryti visu 100%, tai vadinama „atvirkštinio veikimo“ valdymu.
Valdymo funkcijos matematinis modelis

Šiame matematiniame modelyje visos negatyvios konstantos Kp, Ki ir Kd reiškia proporcingų, integralinių ir išvestinių terminų koeficientus (kai kuriais atvejais jie taip pat žymimi P, I ir D).
PID kontrolės sąlygų pritaikymas
Iš minėtų diskusijų supratome, kad iš esmės PID valdymo sistema veikia su trimis valdymo parametrais, tačiau kai kurios mažesnės programos gali rinktis naudoti keletą šių terminų ar net vieną terminą iš trijų terminų.
Tinkinimas atliekamas nenaudojant terminą nustatant nulį ir įtraukiant porą terminų PI, PD arba pavienius terminus, pvz., P ar I. Tarp jų PI valdiklio konfigūracija yra dažnesnė, nes terminas D paprastai yra linkęs į triukšmą įtaką ir todėl daugeliu atvejų pašalinama, nebent tai griežtai privaloma. I terminas paprastai yra įtrauktas, nes jis užtikrina, kad sistema pasiektų numatytą optimalią tikslinę vertę išvestyje.
Pora: Kaip sukurti „Flyback Converter“ - išsamią pamoką Kitas: nuo 5 KVA iki 10 KVA automatinis įtampos stabilizatorius - 220 voltų, 120 voltų