
Šiais laikais robotika tampa viena pažangiausių technologijų srityje. The robotikos taikymai daugiausia užsiima automobilių, medicinos, statybos, gynybos srityje, taip pat naudojama kaip gaisro gesinimo robotas padėti žmonėms nuo gaisro avarijos. Bet valdyti robotą nuotoliniu būdu ar jungikliu yra gana sudėtinga. Taigi sukurtas naujas projektas, tai yra akselerometru paremtas gestų valdymo robotas. Pagrindinis šio projekto tikslas - rankos judesiu valdyti roboto judėjimą naudojant akselerometrą.

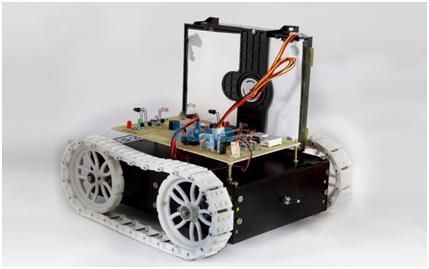
Akselerometro robotas, valdantis gestus
Akselerometro robotas, valdantis gestus
Šis projektas apima siųstuvo skyrių ir imtuvo skyrių. The reikalingi komponentai statyti šį projektą yra Ht12e, Ht12d, L293D, AT89S52, 7805, kondensatorius, krištolas, PBT jungtis, vieno poliaus antena, rezistorius, LED, akselerometras ir akumuliatorius. Akselerometras yra esminis šio projekto įtaisas.
akselerometras ar siųstuvo įtaisas priklauso nuo rankos mosto. Per siųstuvą gaunama komanda, kuri apdorojama mikrovaldiklio „At89S51“ pagalba. Tai mikrovaldiklis duoda signalas robotui judėti pageidaujama kryptimi. Pagrindinis šio roboto veikimo principas - duomenų signalai, perduodami prietaiso rodmenis į robote įmontuotą mikrovaldiklį. Iš anksto užprogramuotas mikrovaldiklis veikia pagal programą, dėl kurios robotas veikia atitinkamai.
Gestu valdomas robotas, naudojant akselerometrą, yra vienos rūšies robotas, kurį galima valdyti judant ranka, uždėjus ant jo akselerometrą. Šis projektas yra padalintas į dvi dalis siųstuvo ir imtuvo įtaisą. Kai gestų įtaisas veikia kaip siųstuvas, o robotas - kaip imtuvo įtaisas. Kai ant rankos uždedamas perdavimo įtaisas (akselerometras), jis robotui siunčia signalus reikalingai operacijai.
Pagrindinius komponentus, naudojamus siunčiančioje sekcijoje, sudaro akselerometras, komparatorius, HT12E IC koderis ir RF siųstuvas .
Akselerometras
Akselerometras yra vienas jutiklio tipas ir jis suteikia analoginius duomenis judėdamas X, Y ir Z kryptimi. Šios kryptys priklauso nuo jutiklio tipo. Akselerometro schema parodyta žemiau. Šis jutiklis susideda iš rodyklių krypčių, jei jutiklį pakreipsime viena kryptimi, duomenys prie konkretaus kaiščio pasikeis analogo pavidalu. Akselerometras susideda iš šešių kaiščių, kur kiekvieno smeigtuko funkcija yra aptariamas toliau.

Akselerometras
- 1 smeigtukas: VDD kaištis šiam kaiščiui tiekti + 5 V
- Kaištis-2: GND kaištis yra prijungtas prie žemės, kad būtų įtempta
- 3 kaištis: X kaištis duomenis gaus X kryptimi
- 4 smeigtukas: „Y“ kaištis gaus duomenis Y kryptimi
- 5 smeigtukas: „Z“ smeigtukas gaus duomenis Z kryptimi
- 6 kaištis: ST kaištis naudojamas akcelerometro jautrumui reguliuoti 1,5 g arba 2 g, 3 g arba 4 g
Palygintojas
Palyginamasis naudojamas norint pakeisti analoginę įtampą į skaitmeninę įtampą ir palygina tą analoginę įtampą su etalonine įtampa ir pateikia tikslią žemą arba aukštą įtampą
Koduotojas
Šis koderis naudojamas 4 bitų duomenims koduoti ir perduodamas naudojant RF siųstuvo modulį.
RF siųstuvo modulis
RF TX modulis veikia 433MHz dažniu ir šis modulis yra lengvai prieinamas rinkoje su mažomis sąnaudomis
Pagrindiniai komponentai, naudojami priėmimo skyriuje, yra imtuvas, dekoderis, mikrovaldiklis ir variklio tvarkyklė.

Siųstuvo skyrius
RF imtuvas
Šio projekto RF imtuvas gaus duomenis, kuriuos perduoda perduodantis įrenginys.
Dekoderis
Dekoderis naudojamas nuosekliems duomenims pakeisti lygiagrečiais duomenimis, gaunamais iš RF imtuvo modulio.
Mikrovaldiklis
The mikrovaldiklis yra pati svarbiausia dalis roboto. 8051 šeimos mikrovaldiklis yra naudojamas grandinėje, kad būtų suteikta sprendimo galimybė
Variklio vairuotojas
Variklio vairuotojas yra įtaisas, suteikiantis judesį atlikti tokią užduotį kaip variklis. Taigi reikalaujame, kad variklio vairuotojas juos paleistų per valdiklį. Sąsaja tarp variklio ir mikrovaldiklio gali būti sukurta naudojant L293D variklio tvarkyklės IC šioje grandinėje.
Imtuvo skyriuje RF imtuvo modulis gauna duomenis iš siųstuvo. Gautus duomenis gali iššifruoti IC HT12D. Gautus duomenis gali apdoroti mikrovaldiklis AT89S51, o varikliui valdyti naudojama variklio tvarkyklė.

Imtuvo skyrius
Gestų valdymo robotas veikia
Akselerometru pagrįstas, gestais valdomas robotas juda pagal rankos judesį, kai akselerometrą dedame ant rankos. Kai pakreipiame ranką akselerometru priešais robotą, robotas pradeda judėti į priekį, kol bus atliktas kitas judesys. Kai pakreipiame ranką atgal, robotas keičia savo kryptį ir būseną. Tada jis pradeda judėti atgal, kol bus duotas kitas signalas. Kai pakreipiame ranką kairėje pusėje, robotas juda į kairę pusę, kol bus pateiktas kitas signalas. Tuo pačiu būdu, kai pakreipiame ranką į dešinę pusę, tada robotas juda dešine puse.
Programos
The akselerometro taikymai pagrįstas gestais valdomas robotas
- Šie robotai naudojami karinėse programose robotams valdyti
- Šie robotai naudojami medicinos reikmėms chirurgijos tikslais
- Ši robotika naudojama statybų srityje
- Ši robotika naudojama pramonėje valdyti trolį ir kėlimą.
Taigi, viskas yra apie akselerometru pagrįstą gestų valdymo robotą, jo veikimą ir programas. Tikimės, kad geriau supratote šią koncepciją. Be to, bet kokios abejonės dėl šios koncepcijos ar elektronikos projektai , pateikite savo atsiliepimą komentuodami žemiau esančiame komentarų skyriuje. Štai jums klausimas, kokios yra akselerometru pagrįsto gestų valdymo roboto programos?
Nuotraukų kreditai:
- Akselerometro robotas, valdantis gestus ytimg
- Akselerometras static.flickr







{kind=link}
{kind=link}