Šiame įraše mes pabandysime suprasti įvairius parametrus, reikalingus suprojektuoti teisingą „buck“ konverterio induktorių, kad reikalinga išvestis galėtų pasiekti maksimalų efektyvumą.
Savo ankstesniame įraše mes sužinojome kibirų keitiklių pagrindai ir suprato svarbų aspektą, susijusį su tranzistoriaus įjungimo laiku, atsižvelgiant į PWM periodinį laiką, kuris iš esmės lemia keitiklio keitiklio išėjimo įtampą.
Šiame įraše mes gilinsimės šiek tiek giliau ir bandysime įvertinti ryšį tarp įėjimo įtampos, tranzistoriaus perjungimo laiko, išėjimo įtampos ir įtampos induktoriaus srovės ir apie tai, kaip juos optimizuoti projektuojant „buck“ induktorių.

„Buck Converter“ specifikacijos
Pirmiausia supraskime įvairius parametrus, susijusius su „Buck Converter“:
Didžiausia induktoriaus srovė, ( ipk ) = Tai maksimalus srovės kiekis, kurį induktorius gali sukaupti prieš prisisotindamas. Čia terminas „prisotintas“ reiškia situaciją, kai tranzistoriaus perjungimo laikas yra toks ilgas, kad jis ir toliau būna įjungtas, net kai induktorius peržengia didžiausią ar didžiausią srovės kaupimo pajėgumą. Tai nepageidaujama situacija ir jos reikia vengti.
Minimali induktoriaus srovė ( iarba ) = Tai yra mažiausias srovės kiekis, kurį induktorius gali leisti pasiekti, kol induktorius išsikrauna, išlaisvindamas jo sukauptą energiją galinės EMF pavidalu.
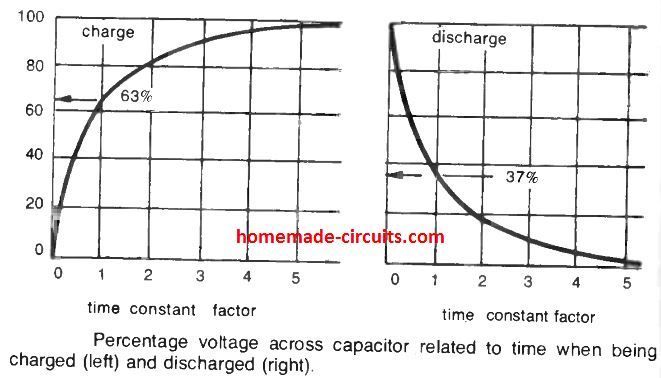
Tai reiškia, kad procese, kai tranzistorius yra išjungtas, induktorius išleidžia savo sukauptą energiją į apkrovą ir eigoje jo sukaupta srovė eksponentiškai krenta link nulio, tačiau prieš pasiekiant nulį tranzistorius gali būti vėl įjungtas taškas, kuriame tranzistorius gali vėl įsijungti, vadinamas minimalia induktoriaus srove.
Minėta sąlyga taip pat vadinama nepertraukiamu režimu a „buck“ keitiklio dizainas .
Jei tranzistorius neįsijungia atgal, kol induktoriaus srovė nesumažėja iki nulio, situacija gali būti vadinama pertraukiamuoju režimu, kuris yra nepageidaujamas būdas valdyti „buck“ keitiklį ir gali sukelti neefektyvų sistemos darbą.
Virpėjimo srovė, (Δi = ipk - iarba ) = Kaip matyti iš gretimos formulės, bangavimas Δ i yra didžiausios srovės ir mažiausios srovės, sukeltos spynos induktoriuje, skirtumas.
Filtro kondensatorius, esantis „Buck“ keitiklio išėjime, paprastai stabilizuos šią bangavimo srovę ir padės ją palyginti pastovią.
Darbo ciklas, (D = Tant / T) = Darbinis ciklas apskaičiuojamas padalijus tranzistoriaus įjungimo laiką iš periodinio laiko.
Periodinis laikas yra bendras laikas, kurio reikia vienam PWM ciklui užbaigti, tai yra vieno tranzistoriui tiekiamo PWM įjungimo laikas + išjungimo laikas.
Tranzistoriaus įjungimo laikas ( Tant = D / f) = PWM įjungimo laiką arba tranzistoriaus įjungimo laiką galima pasiekti padalijus darbo ciklą iš dažnio.
Vidutinė išėjimo srovė arba apkrovos srovė, ( ipaukštis = Δi / 2 = i apkrova ) = Jis gaunamas padalijus pulsacijos srovę iš 2. Ši vertė yra didžiausios srovės ir mažiausios srovės, kuri gali būti pasiekiama per „buck“ keitiklio išėjimo apkrovą, vidurkis.
Trikampio bangos irms RMS vertė = √ { iarba du + (Δi) du / 12} = Ši išraiška pateikia visų arba bet kokio trikampio bangos komponento, kuris gali būti susietas su „buck“ keitikliu, RMS arba vidutinę kvadratinę vertę.
Gerai, todėl aukščiau išvardyti įvairūs parametrai ir išraiškos iš esmės buvo susiję su „buck“ keitikliu, kurį galima panaudoti apskaičiuojant „buck“ induktorių.
Dabar sužinokime, kaip įtampa ir srovė gali būti susiję su indukciniu induktoriumi ir kaip juos teisingai nustatyti iš šių paaiškintų duomenų:
Prisiminkite, kad mes darome prielaidą, kad tranzistorius perjungiamas į nepertraukiamą režimą, ty tranzistorius visada įsijungia, kol induktorius gali visiškai išlaisvinti savo saugomą EMF ir tapti tuščias.
Tai iš tikrųjų daroma tinkamai nustatant tranzistoriaus įjungimo laiką arba PWM darbo ciklą atsižvelgiant į induktoriaus pajėgumą (apsisukimų skaičių).
V ir aš santykiai
Santykį tarp įtampos ir srovės „buck“ induktoriuje galima nustatyti taip:
V = L di / dt
arba
i = 1 / L 0ʃtVdt + iarba
Pirmiau pateikta formulė gali būti naudojama apskaičiuojant išėjimo srovės srovę ir ji tinka, kai PWM yra eksponentiškai kylančios ir nykstančios bangos formos arba gali būti trikampio banga.
Tačiau jei PWM yra stačiakampio formos bangos ar impulsų pavidalu, aukščiau pateiktą formulę galima parašyti taip:
i = (Vt / L) + iarba
Čia Vt yra apvijos įtampa, padauginta iš laiko, kurį ji išlaikė (mikro sekundėmis)
Ši formulė tampa svarbi apskaičiuojant indukcijos induktyvumo vertę L.
Pirmiau pateikta išraiška atskleidžia, kad srovės iš „Buck“ induktoriaus išvestis yra tiesinės rampos arba plačių trikampio bangų forma, kai PWM yra trikampių bangų pavidalu.
Dabar pažiūrėkime, kaip galima nustatyti didžiausią srovę „buck“ induktoriuje, formulė yra tokia:
ipk = (Vin - Vtrans - Vout) Tonas / L + iarba
Pirmiau pateikta išraiška suteikia mums didžiausią srovę, kai tranzistorius yra įjungtas ir kai srovė induktoriaus viduje kaupiasi tiesiškai (jo prisotinimo diapazone *)
Skaičiuojant smailės srovę
Todėl aukščiau pateiktą išraišką galima naudoti apskaičiuojant smailės srovės kaupimąsi indukciniame induktoriuje, kai tranzistorius yra įjungimo fazėje.
Jei posakis io yra perkeltas į LHS, gauname:
ipk- Ašarba= (Vynas - „Vtrans“ - „Vout“) tonos / l
Čia „Vtrans“ nurodo įtampos kritimą tranzistoriaus kolektoriuje / spinduolyje
Prisiminkite, kad pulsacijos srovę taip pat suteikia Δi = ipk - io, todėl pakeisdami tai aukščiau pateiktoje formulėje:
Δi = (Vin - Vtrans - Vout) Ton / L ------------------------------------- Eq 1
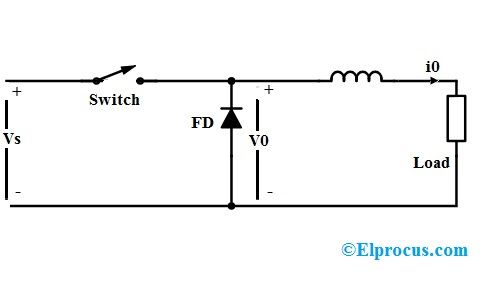
Dabar pažiūrėkime išraišką, kaip gauti srovę induktoriuje per tranzistoriaus išjungimo laikotarpį, ją galima nustatyti naudojant šią lygtį:
iarba= ipk- („Vout“ - VD) „Toff“ / „L“
Vėlgi, aukščiau pateiktoje išraiškoje pakeisdami ipk - io Δi gausime:
Δi = (Vout - VD) Toff / L ------------------------------------- Eq # 2
Eq # 1 ir Eq # 2 gali būti naudojami nustatant pulsacijos srovės vertes, kai tranzistorius tiekia srovę induktoriui, tai yra jo įjungimo metu ..... ir kol induktorius išeikvoja sukauptą srovę per apkrovą tranzistoriaus išjungimo laikotarpiais.
Pirmiau pateiktoje diskusijoje mes sėkmingai išvedėme lygtį, kad nustatytume srovės (stiprintuvo) faktorių „buck“ induktoriuje.
Įtampos nustatymas
Dabar pabandykime rasti išraišką, kuri mums gali padėti nustatyti įtampos koeficientą indukciniame induktoriuje.
Kadangi Δi yra dažnas tiek Eq # 1, tiek Eq # 2, galime lyginti sąlygas tarpusavyje, kad gautume:
(Vynas - Vtrans - Vout) Tona / L = (Vout - VD) Toff / L
„VinTon“ - „Vtrans“ - „Vout“ = „VoutToff“ - „VDToff“
„VinTon“ - „Vtrans“ - „VoutTon“ = „VoutToff“ - „VDToff“
„VoutTon“ + „VoutToff“ = „VDToff“ + „VinTon“ - „VtransTon“
Vout = (VDToff + VinTon - VtransTon) / T.
Aukščiau pateiktoje išraiškoje pakeisdami Ton / T išraiškas darbo ciklu D, gausime
Vout = (Vin - Vtrans) D + VD (1 - D)
Toliau apdorodami aukščiau pateiktą lygtį, gauname:
Vout + VD = (Vin - Vtrans + VD) D
arba
D = „Vout“ - VD / („Vin - Vtrans“ - VD)
Čia VD reiškia įtampos kritimą diode.
Skaičiuojant žemyn įtampą
Nepaisydami tranzistoriaus ir diodo įtampos kritimo (nes tai gali būti labai nereikšminga, palyginti su įėjimo įtampa), mes galime sumažinti aukščiau pateiktą išraišką, kaip nurodyta toliau:
Vout = DVin
Pirmiau pateiktą galutinę lygtį galima naudoti apskaičiuojant sumažinimo įtampą, kuri gali būti skirta iš konkretaus induktoriaus, projektuojant „buck“ keitiklio grandinę.
Pirmiau pateikta lygtis yra ta pati, kuri aptarta išspręstame mūsų ankstesnio straipsnio pavyzdyje ' kaip veikia „buck“ keitikliai .
Kitame straipsnyje mes sužinosime, kaip įvertinti „Buck“ induktoriaus posūkių skaičių.
Pora: Kaip veikia „Buck“ keitikliai Kitas: Didelio galingumo be šepetėlių variklio valdiklio grandinė