Elektromechaninis prietaisas arba mašina, naudojama įvairiems tikslams ir valdoma bei valdoma programavimo metodų pagalba, vadinama robotu. Robotai yra įvairių tipų, atsižvelgiant į jų taikymą, pvz pramoniniai robotai , kariniai robotai, kosminiai robotai, buitiniai robotai, vaikščiojantys robotai, laipiojimo robotai ir kt. Pažangiausias robotikos projektai yra kuriamos efektyviai naudoti įvairiose srityse kelioms programoms. Šiame straipsnyje aptarkime specialų robotikos projektų tipą, būtent liniją sekančią robotizuotą transporto priemonę su ėjimo ir laipiojimo mechanizmu.
Robotinė transporto priemonė

Robotikos projektai inžinerijos studentams
robotizuotos transporto priemonės yra specialių tipų mašinos, skirtos autonomiškai judėti ant žemės, ore, po vandeniu ir erdvėje be laive esančio žmogaus. Šias robotizuotas transporto priemones valdo ir valdo įvairūs jutikliai pagrįstas valdymo sistemas. Robotinės transporto priemonės yra specialiai suprojektuotos naudoti tokiomis sąlygomis, kai žmonės negali patekti į gaisrą, esant labai aukštai ar labai žemai temperatūrai ir kt.
Linijos sekėjo robotas

Linijos sekėjo robotas
Robotinė transporto priemonė, judanti sekdama tam tikru keliu ar linija, gali būti vadinama a linijos sekėjo robotas . Šie linijos sekimo robotai yra specialiai naudojami pramonėje specialiems tikslams, pavyzdžiui, gabenant įvairias dalis ar mašinas ar transporto priemones (automobilius, dviračius ir kt.), Sekant konkrečią liniją iš vieno taško (generatoriaus) į kitą tašką (surinkimo bloką). .
Įprasta linija, einanti po robotizuota transporto priemone, pasižyminti specialiomis savybėmis, tokiomis kaip ėjimo ir lipimo mechanizmas, yra viena iš įdomūs robotikos projektai inžinerijos studentams , kurį galima naudoti kelioms programoms. Paprasti žingsniai, skirti sukonstruoti linijos sekėjo robotą su ėjimo ir laipiojimo mechanizmu, parodyti žemiau.
1 žingsnis: reikalingų komponentų surinkimas

Elektriniai ir elektroniniai komponentai
Komponentai, reikalingi suprojektuoti liniją, einančią po robotizuota transporto priemone su ėjimo ir lipimo mechanizmu, turi būti įvertinti remiantis roboto pritaikymu. Surinkite visus elektrinius ir elektroninius komponentus, tokius kaip rezistoriai, kondensatoriai, infraraudonųjų spindulių siųstuvai, nuolatinės srovės varikliai, tranzistoriai, roboto korpusas ir fotodiodai su atitinkamais įvertinimais, kartu su kitomis dalimis, tokiomis kaip kartonas, varžtai, veržlės, aliuminio juostos ir kt.
2 žingsnis: Linijos pasekėjo roboto grandinės analizė

Linija, einanti po robotizuotą transporto priemonę, išplečiama į vaikščiojimo ir laipiojimo robotų blokų schemą
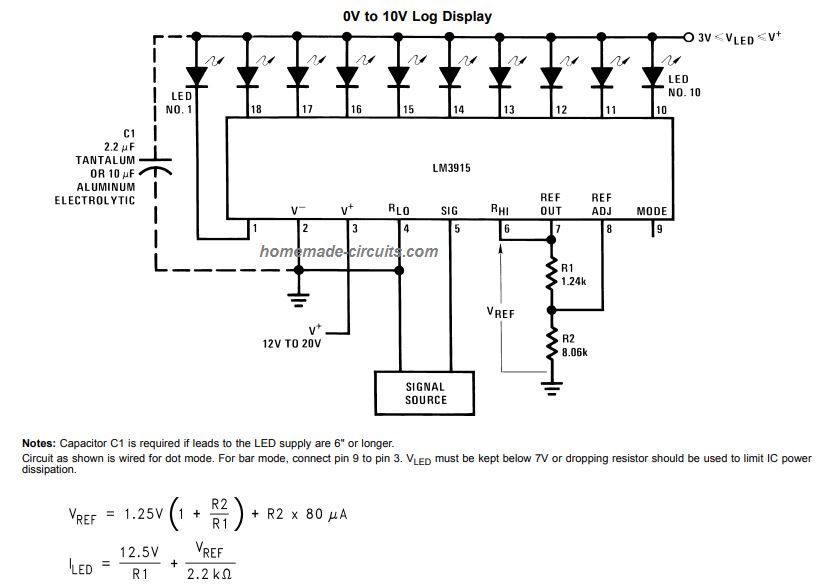
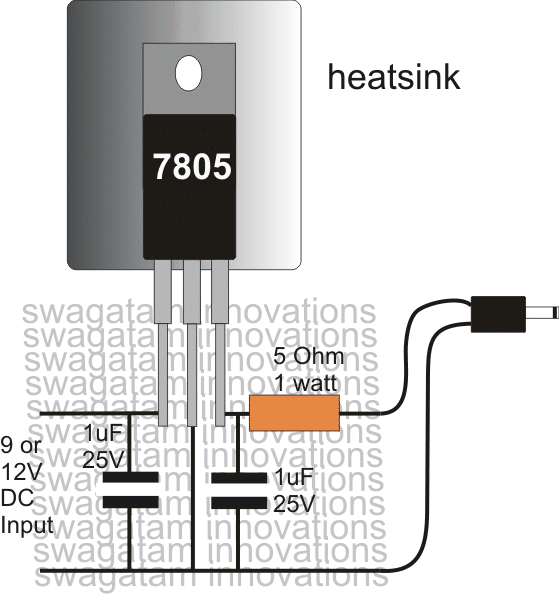
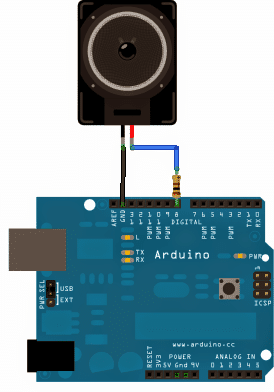
Pirmiausia suprojektuokite projekto schemų blokinę schemą su įvairiais blokais, tokiais kaip a maitinimo blokas IR šviesos diodų ir fotodiodų blokas ir pan. Surinkę komponentus, išanalizuokite grandinės projektą, remdamiesi įvairiais naudojamais komponentais. Tada, prieš montuodami grandinę ant PCB, komponentus padėkite ant be litavimo plokščių, kaip parodyta schemoje, naudodami jungiamuosius laidus, kad patikrintumėte grandinę. Išbandžius grandinę be lydmetalio plokštės, jei reikia kokių nors grandinės pakeitimų ar komponentų reitingų, pakaitomis galima lengvai atlikti, neišeikvojant pinigų ir laiko komponentams pakeisti ar grandinės konstrukcijai pakeisti.
3 žingsnis: komponentų surinkimas ir litavimas

Linija, einanti po robotizuotą transporto priemonę, išplečiama iki vaikščiojimo ir laipiojimo robotų projekto
Taigi, išanalizavę grandinės konstrukciją, surinkite komponentus pagal grandinės schemą per PCB. Tada lituokite grandinę naudodami litavimo pistoletą ir litavimo laidą, laikydamiesi tinkamų litavimo nurodymų. Tinkamai prijunkite visas roboto dalis, kad susidarytumėte linijos sekimo robotą, kaip parodyta aukščiau esančiame paveikslėlyje, ir, jei reikia, klijuokite roboto transporto priemonės dalis.
4 žingsnis: Linijos sekėjo roboto darbas
IR siųstuvas ir fotodiodas naudojami kaip a fotosensorius pora, kuri gali būti naudojama nustatant nurodytą linijos sekėjo roboto judėjimo kelią einant ir lipant sienomis. Fotojutiklių pora duoda reikiamus signalus, kad būtų galima perjungti tranzistorius, kuriais varomi linijos sekėjo roboto varikliai.
5 žingsnis: Linijos sekėjo robotinė transporto priemonė su ėjimo ir laipiojimo mechanizmu
Jų yra daugybė robotikos projektai inžinerijos studentams kurioje linijos sekėjas robotizuota transporto priemonė su vaikščiojimo ir lipimo mechanizmu yra novatoriškas ir įdomus projektas, kurį galite kurti patys, naudodamiesi mūsų nemokama el. knyga elektronikos projektams kurti.
robotikos taikymas Kasdieniniame gyvenime sparčiai daugėja funkcijų, tokių kaip pramoninės paskirties - sunkiųjų gaminių perkėlimas ar kėlimas, gabenimas ribotoje srityje sekant tam tikrą kelią, perdirbimas, suvirinimas, buitinė technika, autonominiai robotai, kariniai robotai, skirti sumažinti žmonių skaičių įsitraukimas ir pavojus, bendradarbiavimo robotai, skirti bendrauti su žmonėmis, pvz., skirti atlikti kelias užduotis, edukaciniai robotai, mobilieji robotai ir humanoidai.
Ar jus domina projektavimas elektronikos projektai pats? Ar žinote, kaip sukurti humanoidinius robotus? Jei norite sužinoti daugiau apie robotikos projektus, skirtus inžinerijos studentams, galite pateikti savo klausimus, komentarus, idėjas ir pasiūlymus žemiau esančiame komentarų skyriuje, jei norite gauti techninės pagalbos.