Šiame įraše paaiškinta paprasta kliūtis, leidžianti išvengti roboto grandinės be mikrovaldiklio ir nenaudojant specialių variklio vairuotojo grandinių ar IC. Idėjos paprašė ponas Faiyyazas
Dizainas
Iš esmės tai yra a forma važiuojanti transporto priemonė kuris sugeba aptikti ir išvengti galimų kliūčių savo kelyje ir tinkamai pakeisti kryptį, kad jo judėjimas liktų nenutrūkstamas, paprastas!
Taigi operacija yra automatinė be jokio rankinio ar žmogaus įsikišimo.
Pateikta kliūčių, vengiančių roboto be mikrovaldiklio, idėja, kaip rodo pavadinimas, mikrokontrolerio nenaudoja, todėl yra labai paprasta pastatyti ir tinka bet kuriam naujam mėgėjui.
Projektuodamas grandinę supratau, kad norint įgyvendinti šį principą reikės bent keleto kliūčių jutiklio modulių, nes vieno modulio naudojimas gali sukelti nepastovų variklio judėjimą ir gali nepadėti sklandžiai nukreipti ar pasukti transporto priemonės link laisvas kelias.
Nustatytas transporto priemonės variklis yra gana panašus į nuotolinio valdymo žaislinis automobilis kurį aptariau viename iš ankstesnių įrašų.
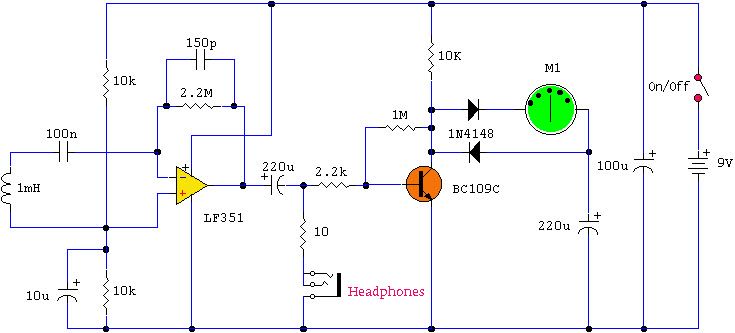
Ši diagrama rodo vieną iš sistemos modulių, todėl dešinėje ir kairėje transporto priemonės pusėje reikėtų dviejų ar poros tokių modulių.
Idėja yra paprasta ir veikia be mikrovaldiklio ir be specialių variklio vairuotojo IC. Tai reiškia, kad jūs galite tai padaryti be jokio kodavimo ir nenaudodami jokio sudėtingo variklio tvarkyklės IC ... pagaminti naudojant šią grandinę, kurie paprastai naudojami prekybos centruose ir panašiose mažmeninės prekybos vietose.
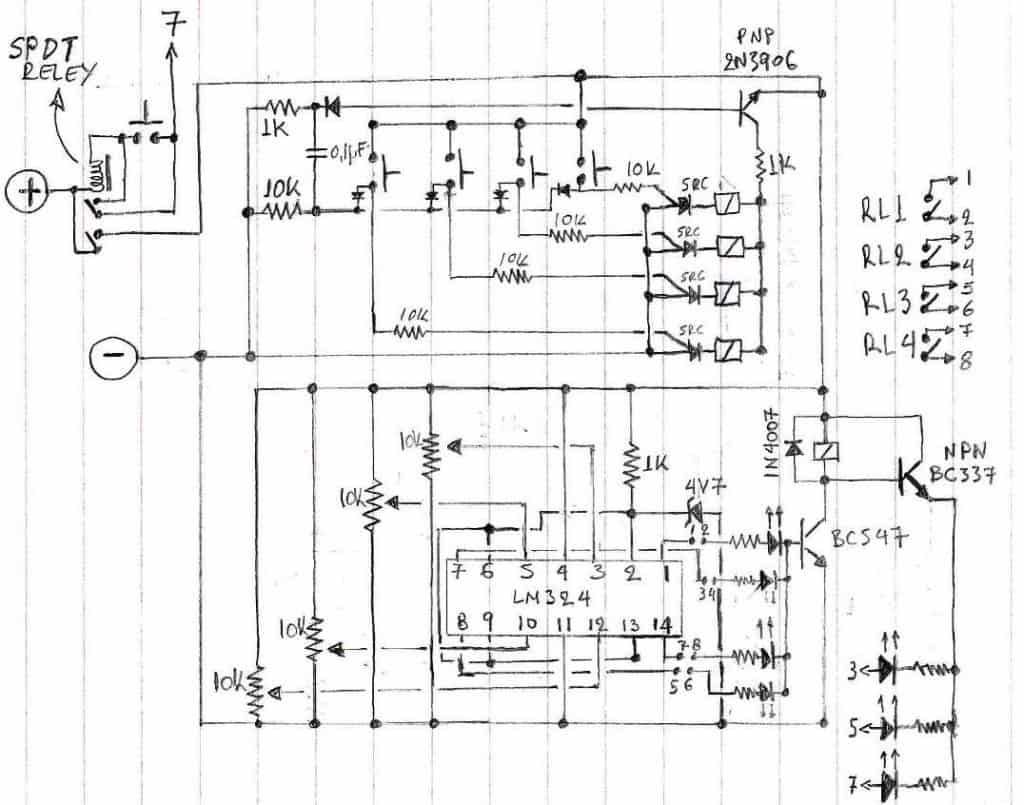
Grandinės schema

Dabar pabandykime suprasti pirmiau pateiktą grandinę naudodami šį paaiškinimą:
Kaip tai veikia
IC 555 yra sukonfigūruotas kaip IR siųstuvas ir nustatytas generuoti pastovų 38 kHz dažnį, o gretima tranzistorinė grandinė yra sukonfigūruota kaip imtuvo arba IR jutiklio pakopa.
Tarkime, kad tai dešinės pusės modulis, ir tarkime, kad šis modulis pirmasis aptinka kliūtį kelyje.
Todėl kai tik aptinkama kliūtis, 555 IC generuojamas 38 kHz dažnis atsispindi gretimos imtuvo grandinės jutiklio link.
Imtuvas akimirksniu įjungia susijusius tranzistorius taip, kad galutinis vairuotojo tranzistorius negali būti laidus.
Dabar variklis, kurį valdo šis tranzistorius, turėtų būti kairėje transporto priemonės pusėje, tai yra priešingoje šio modulio pusėje ... panašiai, dešinėje pusėje esantį variklį iš tikrųjų valdo kairės pusės modulis .
Taigi, įsijungus aukščiau nurodytam dešinės pusės kliūčių detektoriaus moduliui, jis sustabdo kairės pusės variklį, o dešinės pusės varikliui leidžiama judėti normaliai.
Ši situacija lemia tai, kad transporto priemonė yra priversta nukreipti kairę pusę ... o tai reiškia, kad dabar manoma, kad kairysis modulis pradeda gauti dar stipresnius kliūčių signalus ir verčia transporto priemonę sunkiau tęsti vykstant tolyn, kol ji visiškai išvengs kliūties . Dabar modulis nustoja priimti kliūčių signalus ir transporto priemonė pradeda normaliai judėti į priekį nauju keliu.
Vykdant pirmiau nurodytą nukreipimą kairysis šoninis modulis priverstas vis labiau izoliuotis ir nutolti nuo kliūties, kad nebūtų suteikta galimybė kištis į procedūrą ir leisti švariai ir sklandžiai nukreipti transporto priemonę.
Lygiai tos pačios procedūros yra įgyvendinamos tuo atveju, jei kairysis modulis pajunta kliūtį, esančią priešais dešinės pusės modulį, kai transporto priemonė priversta vis sunkiau judėti dešinės pusės link.
Taip pat modulyje galime pamatyti „išjungimo“ grandinės etapą, kuris yra sujungtas kairiajame ir dešiniajame šonuose. Šis etapas yra specialiai įvestas siekiant užtikrinti, kad abu moduliai niekada nebūtų įjungiami kartu.
Todėl, pavyzdžiui, jei kairysis šoninis modulis tampa pirmuoju, kuris aptinka kliūtį, jis nedelsdamas išjungia dešinės pusės modulį ir pradeda transporto priemonės nukreipimą į dešinę ir atvirkščiai.
Jutiklio IC gali būti standartinė TSOP17XX serija
Norėdami sužinoti daugiau apie aukščiau pateiktą jutiklio IC, galite sužinoti kaip prijungti TSOP1738 IC
Variklyje turėtų būti įrengtos pavarų dėžės, kad judėjimas būtų išlaikytas kontroliuojamame lygyje.
Rato nustatymas
Visas kairio ir dešiniojo modulių nustatymas ir su jais susijusios elektros jungtys matomos toliau pateiktame paveikslėlyje:

Atnaujinti
Šiek tiek pagalvojus pasakojama, kad pirmiau minėta paprasta kliūtis, išvengianti roboto grandinės, taip pat gali būti įgyvendinta naudojant vieną modulį, o ne du.
Tačiau vienas modulis leistų transporto priemonei atlikti vienpusį nukreipimą kiekvieną kartą, kai aptinka kliūtį, todėl sistema gali būti sukonfigūruota nukreipti nukreipimą pagal laikrodžio rodyklę arba prieš laikrodžio rodyklę, atsižvelgiant į tai, kuris variklis yra sujungtas su grandine.
Nustatytą pavyzdį galima vizualizuoti šiame paveikslėlyje:

Tačiau atrodo, kad yra viena aukščiau nurodyto vieno variklio problema. Jei tarkime, kad transporto priemonė kairėje pusėje susiduria su stačiu kampu. Tai privers transporto priemonę toliau važiuoti prieš laikrodžio rodyklę, kol ji apsisuks ir pradės judėti atgal ta pačia kryptimi, nuo kurios buvo pradėta. Tai nėra kažkas, ką vartotojas įvertintų.
Pora: SMD rezistoriai - įvadas ir darbas Kitas: Kaip veikia akselerometras