Įvadas į robotus
Robotas yra mašina, kuri atrodo kaip žmonės. Tai buvo užprogramuota tam tikram dalykui. Žodis „Robotas“ kilęs iš slavų kalbos žodžio „robota“ (reiškiantis priverstinį darbininką). Robotas buvo sukurtas 1960 m. Robotai yra pagaminti iš metalų ir kitų elementų maišytuvo. Robotai tiesiog vykdo komandą ir tai, ką sako žmonės. Prieš trisdešimt metų robotai buvo kažkas iš fantastikos filmų. Tačiau šiandien robotika naudojama daugelyje sričių. Ir tai labai svarbu žmonijos ateičiai. The robotų technologijos padėti krašto apsaugai, sveikatos apsaugai, gamybai, šalies saugumui, švietimui, vartojimo prekėms ir daugeliui skirtingų sektorių. Jau gydytojai naudoja robotiką specialiose operacijose. Robotai yra svarbūs, nes jie atlieka pavojingas ir žmonėms neįmanomas užduotis.
5 priežastys, kodėl robotai buvo populiarūs
- Greitis
- Pavojinga aplinka
- Pasikartojančios užduotys
- Efektyvumas
- Tikslumas
Greitis:
Robotai gali būti naudojami, nes jie greičiau nei žmonės atlieka užduotis. Robotas iš tikrųjų yra mechanizmas, kurį valdo kompiuteris. Mes žinome, kad kompiuteriai gali labai greitai apskaičiuoti ir apdoroti duomenis, palyginti su žmonėmis. Kai kurie robotai iš tikrųjų juda greičiau, kad užduotį atliktų, pavyzdžiui, paimtų ir įdėtų daiktus, greičiau nei žmonės.
Pavojinga aplinka:
Robotai gali būti naudojami pavojingoje aplinkoje, nes jie gali dirbti vietoje, kur gresia pavojus žmogui. Pavyzdžiui, robotas gali būti suprojektuotas taip, kad stovėtų daugiau šilumos, radiacijos, cheminių garų, nei galėtų žmonės.
Pasikartojančios užduotys:
Kartais robotai iš tikrųjų nėra daug greitesni už žmones, tačiau jie gerai atlieka tą patį darbą vėl ir vėl. Robotui tai lengva, nes, užprogramavus robotą vieną kartą atlikti darbą, ta pati programa gali paleisti daug kartų, kad atliktų darbą daug kartų. Ir robotas nenuobodžiaus, kaip tai darytų žmogus.
Efektyvumas:
Efektyvumas yra susijęs su užduočių atlikimu be atliekų. Tai reiškia
- Negaišti laiko
- Nešvaistyti medžiagų
- Negaišti energijos
Tikslumas:
Tikslumas - tai labai tikslus užduočių atlikimas. Gamykloje gaminant gaminius, kiekvienas daiktas turi būti pagamintas identiškai. Surenkant daiktus, robotas gali išdėstyti dalis milimetro dalimis.
Roboto valdymas
Pagrindinis robotas arba robotų sistema susideda iš standaus korpuso, kuriame telpa visa roboto schema. Schemą sudaro jutikliai, kurie suvokia bet kokius aplinkos pokyčius ir perduoda šią informaciją valdymo blokui.
Remiantis jutiklių įvestimi, valdymo blokas atitinkamai valdo pavaras. Taigi pagrindinė roboto operacija tenka valdymo blokui. Kai kuriose programose robotas yra visiškai automatinis, t. Y. Valdymas yra pačiame įrenginyje ir, remiantis kai kuriais jutiklių blokais, pavaros automatiškai valdomos valdymo bloko. Kai kuriose programose robotas valdomas rankiniu būdu.
Pažiūrėkime du būdus, kaip valdyti robotą rankiniu būdu
- Naudojimasis mobiliuoju telefonu
- Televizoriaus nuotolinio valdymo pulto naudojimas
Mobiliuoju telefonu valdoma robotizuota transporto priemonė:
Kai kalbėsime apie belaidės robotų transporto priemonės , mes paprastai galvojame apie RF technologijos grandines. Bet šis projektas yra labai skirtingas. Jis naudoja mobilųjį telefoną, kad valdytų robotizuotos transporto priemonės judėjimą. Čia mes naudojome DTMF technologiją, kad valdytume robotizuotą transporto priemonę naudodamiesi mobiliuoju telefonu. Mes naudojome du mobiliuosius telefonus, vienas yra prijungtas prie roboto, o kitas - vartotojo telefonas. Ryšys užmegztas tarp šių dviejų mobiliųjų telefonų ir, jei paspaudžiamas kuris nors klavišas, tas tonas girdimas kitame ląstelės gale. Šis tonas vadinamas „dvigubo tono kelių dažnių“ tonu (DTMF).

Mobiliuoju telefonu valdoma robotizuota transporto priemonė

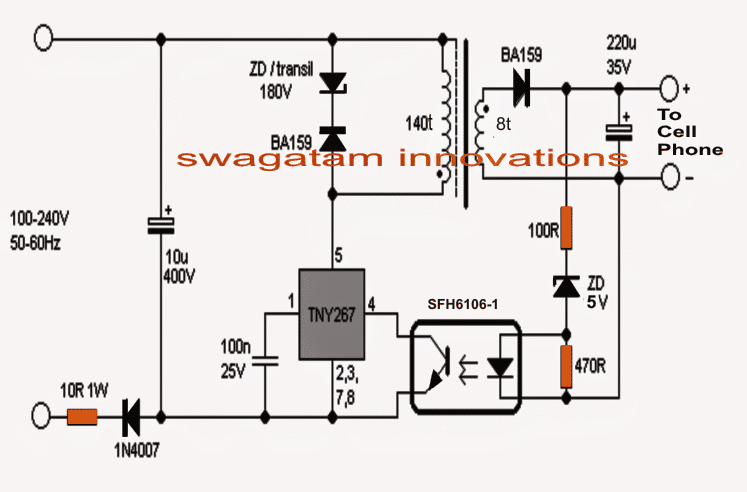
Mobilaus telefono valdoma robotizuotų transporto priemonių grandinių schema
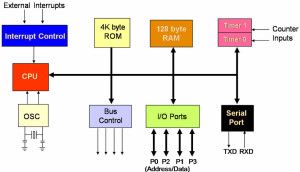
Šis projektas skirtas plėtoti a robotinė transporto priemonė kad valdo mobilusis telefonas. Tai pagrįsta 8051 mikrovaldikliu. Du mobilieji telefonai valdo robotą pagal reikalavimus. Vienas mobilusis telefonas yra prijungtas prie roboto, o kitas yra vartotojo mobilusis. Kai vartotojo mobiliajame telefone paspaudžiamas klavišas sukuria atitinkamą toną, jis gaunamas kitoje ląstelėje. Gautą toną apdoroja mikrovaldiklis, naudodamas DTMF dekoderį. Dekoderis dekoduoja DTMF toną į dvejetainius skaitmenis ir šie dvejetainiai koduoti duomenys siunčiami į mikrovaldiklį. Remiantis mobiliojo telefono įvestimi, mikrovaldiklis atitinkamai duoda tinkamus signalus variklio vairuotojui, kad kiekvienas variklis pasuktų norima kryptimi. Pavyzdžiui, paspaudus tam tikrą numerį vartotojo mobiliajame telefone, skambutis automatiškai renkamas į sistemos mobilųjį telefoną. Mobilioji sistema yra prijungta prie DTMF dekoderio, kuris atitinkamai iššifruoja toną, o variklis pasukamas paspaudimo skaičių atitinkančia kryptimi.
IR valdoma robotizuota transporto priemonė:
Šioje sistemoje robotizuotą transporto priemonę valdo televizoriaus pultelis. Infraraudonųjų spindulių (IR) jutiklis yra susietas su roboto valdymo bloku, kad būtų galima nustatyti nuotolinį signalą. Ši informacija perduodama valdymo blokui, kuris perkelia robotą pagal reikalavimus. Mikrovaldiklis naudojamas kaip valdymo sistema.
Šiame IR nuotolinio valdymo pulte veikia kaip siųstuvas. Kai nuotolinio valdymo pulte paspaudžiamas mygtukas, signalą perduos ir jį gaus IR imtuvas. Šis ženklas siunčiamas į mikrovaldiklį, kuris iššifruoja signalą ir atlieka susijusį judesį pagal nuotolinio valdymo pulte paspaustą mygtuką. Pvz., Jei nuotolinio valdymo pulte bus paspaustas skaičius 1, robotas bus pasuktas kairėn, kaip reikalaujama. Kitų įmonių testas (į priekį, atgal ir į dešinę) bus atliekamas lyginamuoju būdu, naudojant IR. Priėmimo gale plėtrą pasiekia du varikliai, kurie yra susieti su mikrovaldikliu.
Programa yra parašyta, t. Y. Vykdoma ji siunčia komandas variklio vairuotojo IC, kaip reikalaujama, kad robotas judėtų varikliu, kaip paaiškinta aukščiau.

IR valdoma robotizuotų transporto priemonių blokinė schema
Jei kyla abejonių dėl šio straipsnio, palikite komentarą. Ir leiskite man sužinoti daugiau su tuo susijusių taikymų ir metodų?